- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 35 Author: Site Editor Publish Time: 2022-04-28 Origin: Site
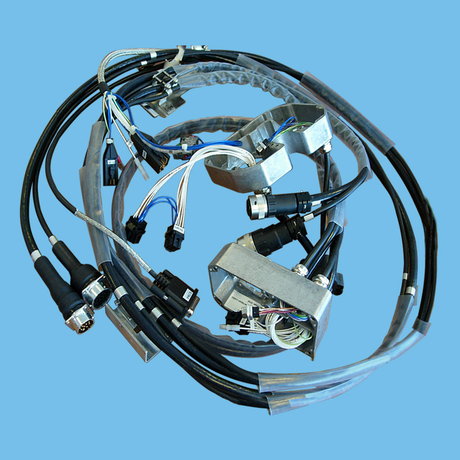
At present, with the development of industrial intelligence, the robotics industry is gradually improving its technology, and the application scenarios and the environment are becoming more and more extensive. With such trend development, the safety of robots becomes more critical, and fire prevention and explosion-proof are directly related to the life safety of users. The wiring harness is the blood vessel and nerve of the robot equipment; therefore, the demanding quality and quality of the Robotic harnesses are getting higher and higher.

A Robotic harness is mainly used to connect each electrical device in the circuit, composed of terminals, insulating wrapping material, an insulating sheath, and wire, which is the carrier of input and output current and signal.
The robotic harness's overcurrent protection mechanism, robot controller, motor driver, battery pack, and battery management system have multiple high-precision current and temperature sensors. They are mainly used for real-time detection of current and temperature. In the harness processing design process, it is necessary to evaluate the matching between the components and the temperature sensor that the wire can withstand to do matching. And when the abnormal current or temperature, do destructive testing to detect the inaudible body, and the robot control system can make timely reflections to ensure safety.
The entire robot power supply system will be divided into power and communication power; power and communication power are independent and completely isolated. The power part of the over-current is separately powered, and the power board adopts a redundant design and derating design so that the actual over-current capacity can reach twice the rated over-current capacity.
The separating power and communication power can cut off the power when there is a fault or accident, cutting off the energy input of a high current on the drive and preventing more severe accidents. At the same time, the communication power is standard, and the upper computer can read the drive status information to monitor and judge the condition of the fault occurrence in real-time.
When taking into account the charging speed, always ensure that safety is the first, strict use of high current derating, such as charging the robot, the design of the maximum charging current up to 50A, but the use of strict charging according to 30A (derating to 60%) to use.
The charging pile has various protection mechanisms such as short circuits, overcharge, over-voltage, over-discharge, and high temperature. It has multiple protection mechanisms such as temperature check before charging, over-temperature prohibition of charging, and over-temperature active withdrawal of vehicle from charging during charging.